Research Activities / Araştırma Faaliyetleri
|
Lab Research Interests / İlgi Alanlarımız
Unmanned Aerial Vehicles, Design and Control of Robotics / Mechatronic Systems, Vision for Robotic Systems, Autonomous Ground Vehicles
İnsansız hava aracı (İHA) tasarımı, İHA kontrolü, Görsel kontrol, Gezgin robotlar, Otonom Taşıtlar, Endüstriyel Mekatronik uygulamaları üzerine çalışmalar yapılmaktadır. |
SON ÇALIŞMALAR / RECENT PROJECTS
|
Hibrit İnsansız Hava Aracı ile Otonom Teslimat Sistemi Geliştirilmesi / Developing an Autonomous Delivery System with a Hybrid Unmanned Aerial Vehicle
Hibrit paket teslimat hava aracı prototipimiz
Lojistik sektöründe hızlı kentleşme nedeniyle yoğunluk artışı, teslimat verimliliğinin düşüşü ortaya çıkmıştır. Kentsel nüfusun 2011-2030 arasında 1,4 milyar ila 5 milyar arasında artacağını öngörmektedir.
Bu çalışmada hem dikine kalkış iniş yapabilecek, hem de sabit kanat özelliği olan, kargoların otonom teslimatını sağlayabilecek bir hava aracı tasarlanacaktır.
Due to rapid urbanization in the logistics sector, density increase and delivery efficiency decreased. It predicts that the urban population will increase by between 1.4 billion and 5 billion between 2011-2030.
In this study, an aircraft that can both take off and land vertically and have a fixed wing feature that can provide autonomous delivery of cargo will be designed.
Akıllı paket prototipimiz
TÜBİTAK tarafından desteklenmiştir.
İlgili Yayınlar Patent/Faydalı Model: AKILLI PARAŞÜT PAKET TESLİMAT SİSTEMİ, Başvuru Numarası: 2020/05381
Uluslararası Bildiri: Turan Konyalıoğlu, Sinan Alnıpak ve Erdinç Altuğ, “Model Predictive Control of a Hybrid UAV for Parcel Delivery Applications”, AIRPHARO 2021, The 1st AIRPHARO Workshop on Aerial Robotic Systems Physically Interacting with the Environment konferansında sunulmuştur.
|
|
Design of a Quad-Jet VTOL UAS / Dikine kalkıp inebilen Jet motorlu bir hava aracı tasarımı ve kontrolü
Erdinç Altuğ and Abdullah Türkmen
Payload capacity, range and flight duration of a Unmanned Aerial System (UAS) depends mainly on thrust system. Thrust system of a typical electrical multi-rotor UAS consists of electric motors, rotors and electric speed controllers (ESCs). Electric motors are easy to use and their response time is short, which is highly desired and required for control, but they limit potential payload capacity, range and flight duration. In this paper, we propose a Quad-Jet VTOL (vertical take-off and land) UAS with a thrust system consisting of four mini jet engines. Such a vehicle could be useful heavy-lift applications. The UAS model, controllers, thrust direction system (to overcome the response time disadvantage and to improve motion) are presented, along with a first prototype system.
Manufactured jet-quad aircraft system
Related Papers: 1. Abdullah Türkmen, Erdinç Altuğ, “Design of a Quad-Jet VTOL UAS for Heavy-lift Applications”, 2020 International Conference on Unmanned Aircraft Systems (ICUAS'20), Athens, Greece, 2020.
|
|
OTONOM ARAÇLAR İLE YAYALAR ARASI
İLETİŞİM İÇİN LAZER
DEVELOPING LASER BASED PROJECTOR
NOTIFICATION SYSTEM
Barış Çetin ve Erdinc Altug
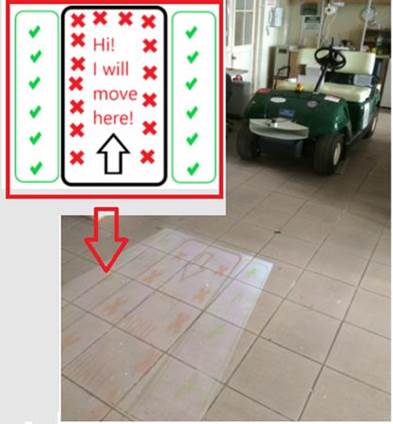
This study fuces on establishing safe and reliable communication and interaction between autonomous vehicles and pedestrians in order to create a safe traffic environment and increase the reliability and acceptability of autonomous vehicles.
Related Papers: MS Thesis of Mr. Barış Çetin (August 2020)
|




|
Design and HIL Setup of an Autonomous Vehicle for Crowded Environments
Şükrü Yaren Gelbal, Erdinc Altug, Emin Faruk Keçeci
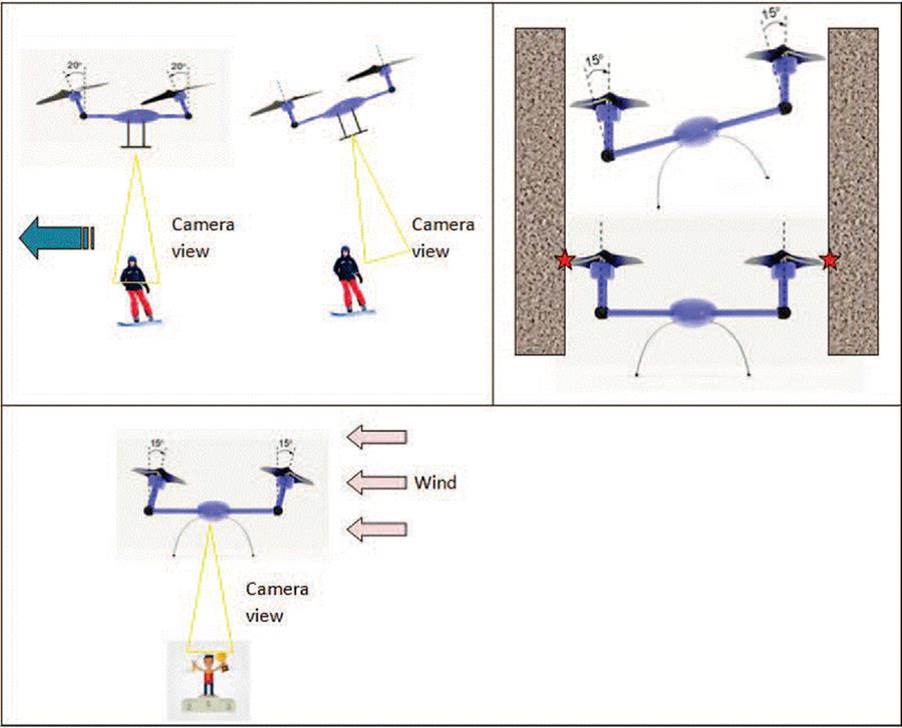
n In this project, the mechatronic design of autonomous human transporter system is presented. n The proposed approach relies on interaction with pedestrians to eliminate the so-called freezing robot problem. n Previous works did not investigate human transportation indoor with pedestrians. n Funded by Scientific and Technological Research Council of Turkey (TÜBİTAK) under grant 115E345.
Related Papers: 1. Sukru Yaren Gelbal, Erdinc Altug, Faruk Kececi, "Design and HIL Setup of an Autonomous Vehicle for Crowded Environments", 2016 IEEE International Conference on Advanced Intelligent Mechatronics, in Banff, Alberta, Canada, July 12–15, 2016. 2. Erdinç Altuğ, Sükrü Yaren Gelba, Mehmet Kabil Gültekin, and Emin Faruk Keçeci, “Localization of an Autonomous Personnel Carrying Vehicle in Indoor Environments, accepted for publication at the 2017 International Conference on Mechatronics Systems and Control Engineering (ICMSCE 2017), Abdullah Gül University, Kayseri, Turkey, February 2-4, 2017. |
|
Design of a Novel Tilt-Roll Rotor Quadrotor UAV
Abdulkerim Fatih Şenkul and Erdinc Altug
Quadrotor with tiltable rotors · In this work, the design and manufacturing of a quadrotor with tiltable rotors that can move without tilting the vehicle has been described. · Funded by Scientific and Technological Research Council of Turkey (TÜBİTAK) under grant 114M765.
Flight-tests
Potential benefits of a multi-rotor vehicle with tiltable rotors
Related Papers: 1. Abdulkerim Fatih Şenkul, Erdinç Altuğ, “System Design of a Novel Tilt-Roll Rotor quadrotor UAV”, at the Journal of Intelligent & Robotic Systems, DOI:10.1007/s10846-015-0301-4, Volume 84, Issue 1, pp 575–599, December 2016. 2. Fatih Şenkul, Erdinç Altuğ, “Adaptive Control of a Tilt – Roll Quadrotor UAV”, International Conference on Unmanned Aircraft Systems (ICUAS 2014), Florida, USA, 27-30 May 2014. |



|
Design of an Embedded Controlled Quadrotor UAV
Hüseyin Burak Kurt and Erdinc Altug
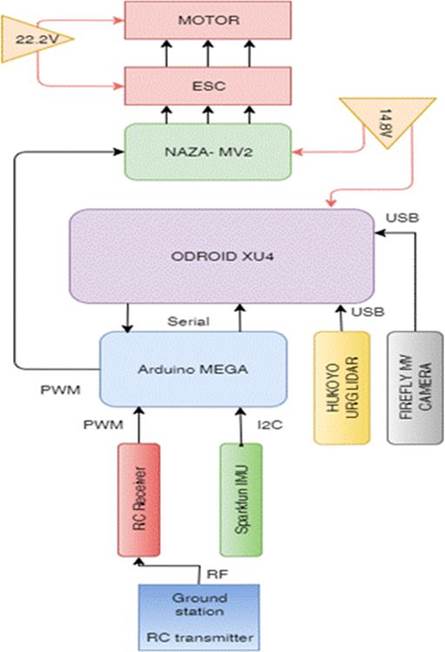
· In this work, a general UAV platform that can be used for education as well as research has been proposed. This system has embedded computers and various sensors such as IMU, camera, LIDAR sensor to implement various control algorithms. · Funded in part by the Research Projects Office (BAP) of İstanbul Technical University under Grant 38359.
1. Hüseyin Burak Kurt and Erdinç Altug, "Development of an Autonomous UAV Platform for Advanced Research Applications”, accepted for publication at the 2017 International Conference on Mechatronics Systems and Control Engineering (ICMSCE 2017), Abdullah Gül University, Kayseri, Turkey, February 2-4, 2017. |

RESEARCH IMAGES
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

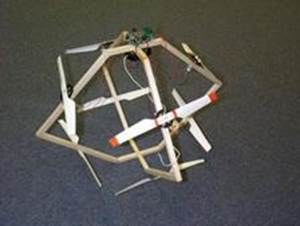

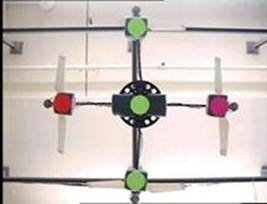







Visual Stabilization of UAV Systems in unknown environments / Bilinmeyen Ortamlardaki insansız Hava Araçların Görsel Stabilizasyonu
Bu çalışmada bilinmeyen ortamlarda çalışan bir İnsansız Hava Aracının (İHA) tasarımı yapılmıştır. Bu aracın ortamda mevcut olacak paralel çizgi veya renkli daire gibi ipuçlarına ihtiyaç bulunmadan stabilizasyon yapmasını sağlaması amaçlanmıştır. Bu amaçla üzerinde iki adet bilgisayar bulunmaktadır. Bunlardan biri aracın kontrolcüsü, diğeri de kamera verilerini işleyecek bir görüş bilgisayarıdır. Detaylı bilgi için ROSE’12 konferansında yayınlanan yayınımızı inceleyebilirsiniz.


a) Geliştirilen quadrotor helicopter b) kullanılan elemanlar: Beagle-board bilgisayar (1), ArduPilot ve IMU (2) devresi, RF modülü (3) ve kamera (4).
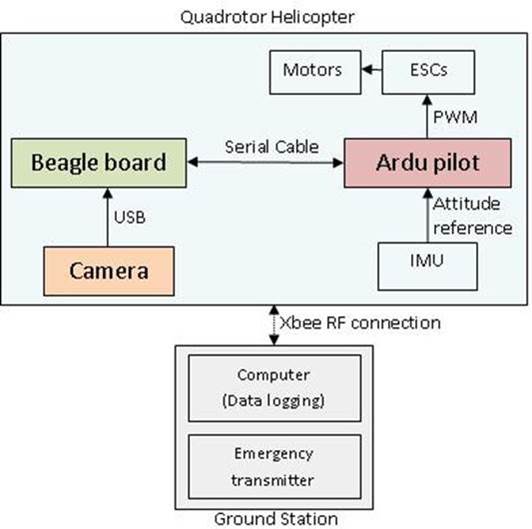
Sistem blok-diyagramı
Hava aracı istenen şartlara göre geliştirilmiştir. Geliştirilen algoritma ile hava aracının stabilizasyonu başarı ile sağlanmıştır. Detaylı bilgi için ROSE’12 yayınını inceleyebilirsiniz. Algoritmanın geliştirilmesine yönelik çalışmalar devam etmektedir.
Otomatik Dingil İndirme Sistemi Geliştirilmesi Projesi
Yüksek lisans öğrencileri Taylan Keleş, Uğur Acar’ın çalışmakta oldukları "Otomatik Dingil İndirme Sistemi" isimli SANTEZ projesi tamamlanmıştır.
Team MEKAR - Grand Cooperative Driving Challenge Project (GCDC)
In 14 and 15th of May 2011, the first Grand Cooperative Driving Challenge (GCDC) was held in Helmond, the Netherlands. The GCDC is an open competition for between research groups on the topic of cooperative, autonomous driving. Team MEKAR lead by Prof. Dr. Levent Güvenç, formed by the students and faculty of Istanbul Technical University, Okan University, Arel University, the Ohio University, and Tofaş-Fiat grouped together to represent the only Turkish team in the competition.
|
|
|


More information available from; GCDC, OU, TUBITAK and see some videos (Reuters, one week before, info).
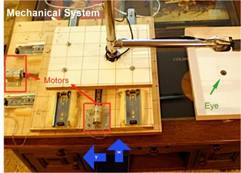
Design and Control of a Visual Servomechanism for Automating Corneal Cross Linking Treatment on Keratoconus Patients (with graduate student Onurcan Şahin)
In this study, a mechatronic system designed for automated corneal cross linking treatment on keratoconus patients was introduced. Keratoconus is a serious illness if not treated may cause serious distortion of vision. Regular treatment of this disease is performed manually. Developed automated system aims to increase the efficiency in treatment and to eliminate any potential side effects and risks of the treatment. The system consists of an image processing algorithm developed on OpenCV sharp, a servomechanism system consisting of various mechanical, electronic components to track the eye of the patient, and a digital PID controller to eliminate any errors.
|
System Block diagram |
Developed system |
|
Experimental system |
Lab. Experiments |



Project: Vision-based Control of Unmanned Aerial Vehicles
This work was supported in part by the Scientific and Technological Research Council of Turkey (TÜBİTAK)
A Unmanned Aerial Vehicles (UAVs) can be simply defined as vehicles that fly without any pilot onboard. UAVs include unmanned aircrafts, helicopters, blimps and other flying vehicles. They come various sizes, small insects to full-size planes. An autonomous UAV brings enormous benefits and is suitable for applications like search and rescue, surveillance, remote inspection, military applications, therefore saving human pilots from dangerous flight conditions. UAVs are especially useful when (i) the working environment is inaccessible or hard to reach (planetary flier), (ii) dangerous (due to war, environment conditions, etc.), (iii) flight is monotonous, (vi) flight time is extended (atmospheric observations, data relay, etc.), (v) flight is not possible even by a skilled pilot (e.g. movie making, flight of experimental vehicles, etc.).
With the advancements in controls, propulsions, advanced materials UAVs are now more frequently used for civilian purposed and for armed forces around the world. The future of the skies lies at the UAV technology.
Our research at the Istanbul Technical University is on modeling and control of helicopter based, gas and electrical powered Unmanned Aerial Vehicles.
|
Experiment set-ups for rotorcraft based UAV control research. |
|
|
Developed experimental flight test apparatus. |
Developed vision systems on board the experimental set-up. |




|
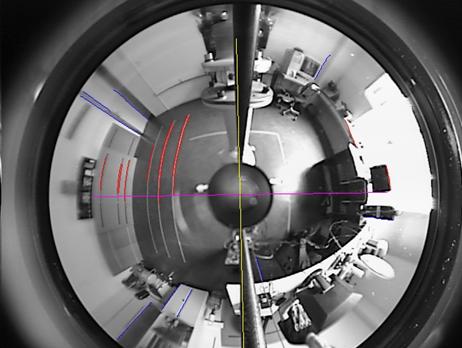
The images obtained from the catadioptric camera can be used to stabilize the UAV. The following pictures show the estimation of the parallel lines in a scene, and estimation of the vanishing lines from those lines. |
|
|
Attitude estimation steps on the images. |
Final result of the attitude estimation. |

|
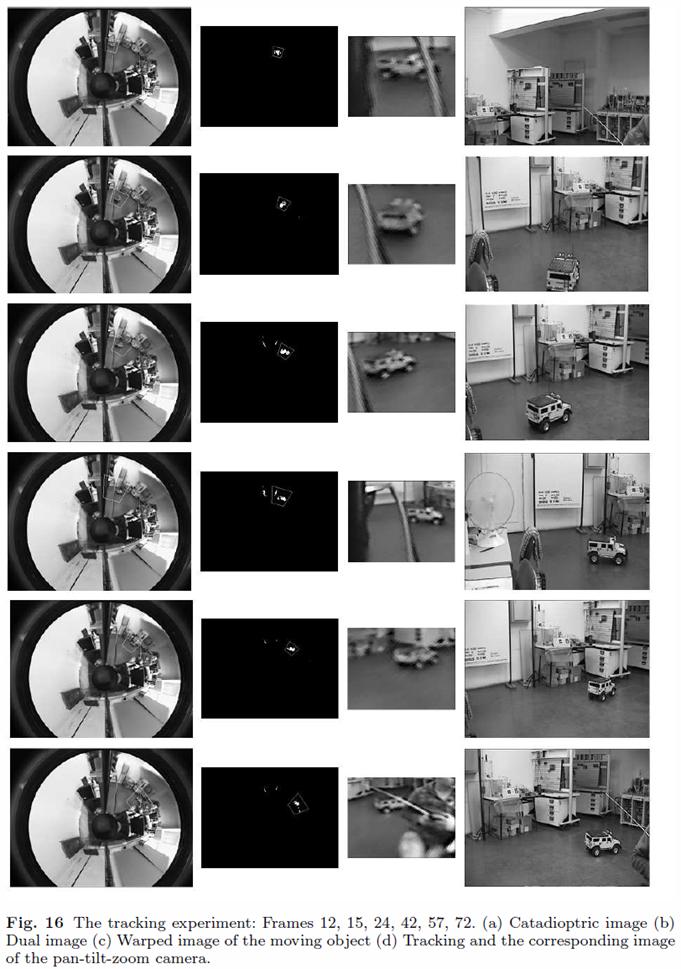
The use of multiple cameras for target determination and tracking for UAVs bring many advantages. |
|
|
|
|
|
Related Papers: JINT Paper |
|
|
Estimating the pose of a flying vehicle with vision for landing and take-off |
|
|
|
|




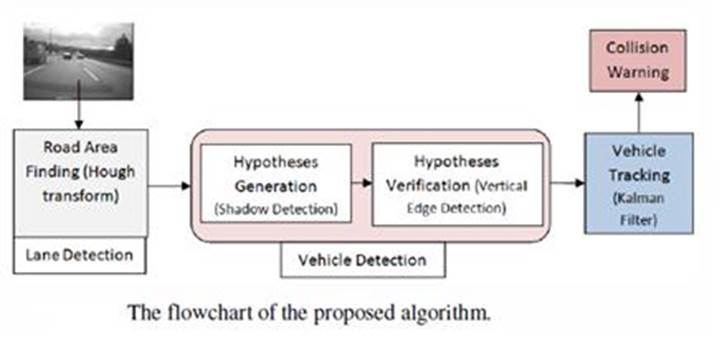
Increasing Driving Safety with a Multiple Vehicle Detection and Tracking System using Ongoing Vehicle Shadow Information
|
Due to the accidents, driving safety became an important topic. The work has mainly been focused on detecting and tracking vehicles viewed from inside a vehicle the camera mounted in daylight conditions. The vision sensor can be used to track the traffic and warn the driver in case of a collision. Unlike previous work, this approach uses vehicle shadow clues and vehicle edge information to obtain cost effective and fast estimation. |
|
|
|
|

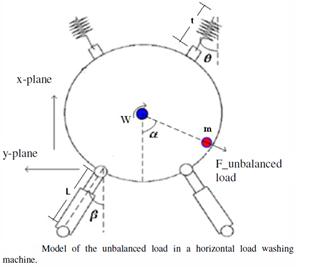
Project: Determining the Mass and Angular Position of the Unbalanced Load in Horizontal Washing Machines (supported by ARÇELİK)
|
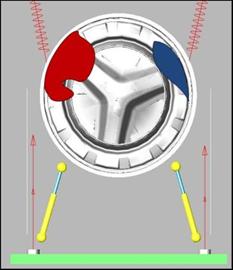
Unbalanced load in washing machines limit the performance, and therefore accurate estimation of unbalanced loads, including their magnitudes and locations in washing drum, is required. In this work, we propose an approach to evaluate the angular position and mass of the unbalanced load. |
|
|
|
Washing machine with unbalanced loads. |
|
Papers about this topic: AIM2009 |
|
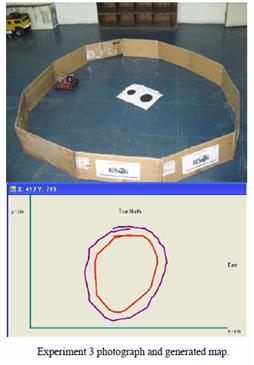
Project: Design of a mobile robot for map building Tasks
|
In this Project, a mobile robot has been designed and manufactured for map building applications. Map building by a mobile robot is useful for many different scenarios, such as earthquake destroyed or contaminated buildings, or mines. |
||
|
|
|
|
|
Papers about this topic: IECON2009, TOK2009 |
||

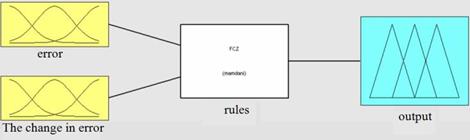
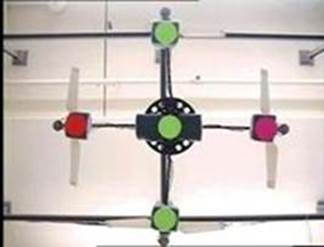
Control of a Quadrotor helicopter using Fuzzy Logic (with student Bora Erginer)
|
In this work, modeling and control of the Quadrotor using Fuzzy logic has been studied. Various simulations performed in MATLAB Simulink show the effectiveness of the fuzzy logic approach. Also, various experiments have been performed to verify the results. A MEMs IMU unit was used as a sensing device. The quadrotor has been fixed on a test stand and the control has been performed using the MATLAB Simulink model. |
|
|
Quadrotor on a test stand |
|
|
Papers about this topic: TOK’07 |
|

MY Ph.D. WORK
|
I received my Ph.D. degree at December 2003 from the University of Pennsylvania (USA). My advisors were Prof. James Ostrowski and Prof. Camillo Taylor. I worked at the GRASP (General Robotics, Automation, Sensing and Perception) Laboratory. The subject of my dissertation is development of a rotorcraft based unmanned aerial vehicle (UAV), modeling, development of the controllers and vision based control. The title of my Dissertation is “Vision Based Control of Unmanned Aerial Vehicles with Applications to an Autonomous Four Rotor Helicopter, Quadrotor. |
|
|
Quadrotor Helicopter |
Camera based Quadrotor control |
|
Octarotor Helicopter Prototype |
Experiment Setup |
|
System Block Diagram |
|
|
Related Papers: IJRR, ICM2004, ICRA2003, ICRA2002 Please see the publications for details. |
Related Videos: |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
[Updated on September 8, 2022]